Notícias da empresa
Como controlar a velocidade e o torque da máquina eletrônica de teste universal
Tempo de liberação:2018-11-23 fonte:Jinan Hengsi Shanda Instrument Co., Ltd. Navegar:
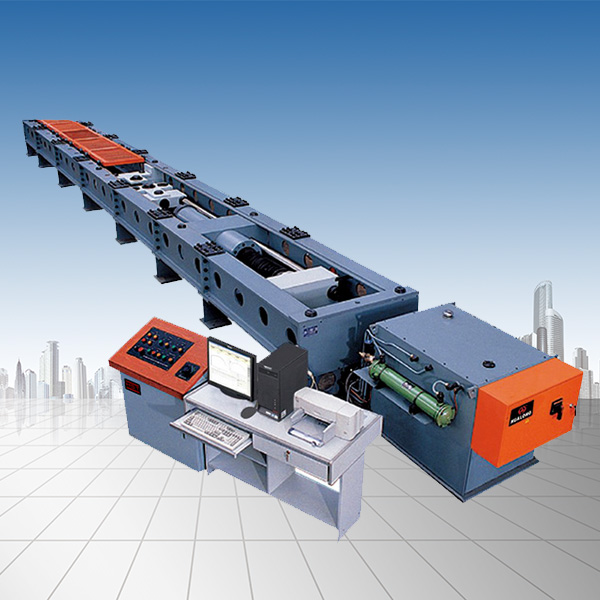
Máquina de teste universal eletrônicoO controle de velocidade e o controle de torque das máquinas de teste universal eletrônicos são controlados por quantidade analógica. O controle de posição da máquina de teste universal eletrônico é controlado pela geração de pulsos. Que método de controle específico deve ser escolhido de acordo com os requisitos do cliente e que tipo de funções de movimento devem ser atendidas.
Se você não tiver requisitos para a velocidade e a posição do testador universal eletrônico do motor, basta produzir um torque constante do testador universal de elétrons, é claro, use o modo eletrônico de torque do testador universal.
Se houver certos requisitos de precisão para a posição do testador universal eletrônico e a velocidade do testador universal eletrônico, mas não estiverem muito preocupados com o torque do testador universal eletrônico em tempo real, não é conveniente usar o modo eletrônico de torque do testador universal e é melhor usar a velocidade eletrônica do testador universal ou a posição do modo de tester universal do testador universal. Se o controlador superior tiver uma função de controle de circuito fechado melhor, o efeito de controle de velocidade do uso da máquina de teste universal eletrônico será melhor. Se os requisitos em si não forem muito altos ou basicamente não houver requisitos em tempo real, o método de controle de posição da máquina de teste universal eletrônico não possui requisitos muito altos para o controlador superior.
A julgar pela velocidade da resposta do motorista do servo, a quantidade de cálculo do modo de torque da máquina de teste universal eletrônica é pequena e o motorista responde ao sinal de controle rapidamente; A quantidade de cálculo do modo de posição da máquina de teste universal eletrônica é lenta para responder ao sinal de controle.
Quando há requisitos relativamente altos para o desempenho dinâmico em movimento, o motor precisa ser ajustado em tempo real. Então, se o próprio controlador tiver uma velocidade lenta no calcário da máquina de teste universal eletrônica (como PLC ou controlador de movimento de baixo custo), o controle eletrônico da Máquina de teste universal é usado. Se o controlador calcular a máquina de teste universal eletrônica a uma velocidade mais rápida, você poderá usar o método eletrônico de velocidade da máquina de teste universal para mover o anel eletrônico de posição da máquina de teste universal do motorista para o controlador para reduzir a carga de trabalho do motorista e melhorar a eficiência (como a maioria dos controladores de movimento de médio a ponta); Se houver um controlador superior melhor, você também poderá usar o método eletrônico de torque da máquina de teste universal para mover o anel de velocidade da máquina de teste universal eletrônico para longe do driver. Geralmente, esse é apenas um controlador dedicado de ponta para fazer isso, e não há necessidade de usar um servo motor no momento.
De um modo geral, se o controle da unidade é bom ou não, cada fabricante diz que faz isso sozinho, mas agora existe um método de comparação mais intuitivo chamado largura de banda de resposta. Quando o controle de torque do testador universal eletrônico ou o controle de velocidade do testador universal eletrônico é usado para fornecer um sinal de onda quadrada através do gerador de pulso, fazendo com que o motor gire continuamente e reverre e aumente continuamente a frequência. O osciloscópio mostra um sinal de varredura. Quando o vértice do envelope atinge 70,7% do valor, significa que a etapa foi perdida. A frequência neste momento pode mostrar cujo produto é ótimo. O loop atual geral pode atingir mais de 1000Hz, enquanto o loop de velocidade do testador universal eletrônico pode atingir apenas algumas dezenas de hertz.
Para colocá -lo de uma maneira mais profissional:
1 Controle de torque do testador universal eletrônico: o método de controle de torque do testador universal eletrônico é definir o torque do eixo do motor à saída externa pela entrada da quantidade analógica externa ou pela atribuição de endereço direto. Especificamente, por exemplo, se 10V corresponde a 5Nm, a saída do eixo do motor será de 2,5 nm quando a quantidade analógica externa será definida como 5V: se a carga do eixo do motor for menor que 2,5nm, o motor gira para a frente, o motor não girará quando a carga externa é igual a 2,5Nm e o motor reversa quando é maior que 2.5nm (geralmente é a carga de 2,5Nm e o motor é superior a 2.5nm (geralmente, a carga de 2,5Nm e o motor não é maior que a carga é maior que a carga de 2,5Nm e o motor não é maior que a carga de 2,5Nm e o motor é maior que a carga é maior. O tamanho do torque definido pode ser alterado alterando instantaneamente a configuração da quantidade analógica, ou pode ser alterado pelo método de comunicação para alterar o valor do endereço correspondente.
A aplicação está principalmente em dispositivos de enrolamento e desenrolamento que possuem requisitos rígidos na força do material, como dispositivos de irradiação de arame ou equipamento de fibra óptica. A configuração de torque da máquina de teste universal eletrônica deve ser alterada a qualquer momento, de acordo com a alteração do raio do enrolamento para garantir que a força do material não mude com a mudança do raio do enrolamento.
2. Controle de posição da máquina de teste universal eletrônica: o modo de controle de posição da máquina de teste universal eletrônico geralmente determina a velocidade da rotação da máquina de teste universal eletrônica através da frequência de pulsos de entrada externa e determina o ângulo de rotação através do número de pulsos. Alguns servos podem atribuir diretamente a velocidade e o deslocamento da máquina de teste universal eletrônica através da comunicação. Como o modo de posição do testador universal eletrônico pode controlar estritamente a velocidade do testador universal eletrônico e a posição do testador universal eletrônico, ele é geralmente usado em dispositivos de posicionamento. Áreas de aplicação, como máquinas -ferramentas CNC, máquinas de impressão, etc.
3. Modo de velocidade eletrônico da máquina de teste universal: a velocidade da máquina de teste universal eletrônica rotativa pode ser controlada através da entrada da quantidade analógica ou da frequência dos pulsos. O modo de velocidade eletrônico da máquina de teste universal também pode ser posicionado quando o controle de PID do anel externo com o dispositivo de controle superior é controlado, mas o sinal de posição do motor ou o sinal de posição da carga direta da máquina de teste universal eletrônico deve ser dada à posição superior para operação. O modo de posição do testador universal eletrônico também suporta anel externo de carga direta para detectar o sinal de posição do testador universal eletrônico. Nesse momento, o codificador na extremidade do eixo do motor detecta apenas a velocidade do motor e o sinal de posição do testador universal eletrônico é fornecido pelo dispositivo de detecção na extremidade direta da carga. Essa vantagem é que ele pode reduzir erros durante o processo de transmissão intermediária e aumentar a precisão do posicionamento de todo o sistema.
4. Vamos falar sobre 3 anéis. O servo é geralmente controlado por três anéis. Os chamados três anéis são três sistemas de ajuste de feedback negativo em circuito fechado. O anel pid dentro é o anel atual, que é completamente realizado dentro do motorista servo. A corrente de saída do driver para cada fase do motor é detectada através do dispositivo Hall, e a corrente de feedback negativa é definida para ajuste do PID, para que a corrente de saída seja o mais próxima possível da corrente definida. O anel atual controla o torque da máquina de teste universal eletrônica do motor, portanto, o cálculo do motorista é pequeno e a resposta dinâmica é rápida no modo de torque da máquina de teste universal eletrônica.
O segundo anel é o anel de velocidade da máquina de teste universal eletrônica. O ajuste do PID de feedback negativo é realizado através do sinal detectado do codificador do motor. A saída PID em seu anel é diretamente a configuração do anel atual. Portanto, o anel de velocidade da máquina de teste universal eletrônico inclui o anel de velocidade e o anel atual. Em outras palavras, qualquer modo deve usar o anel atual. O anel atual é a base do controle. Embora a velocidade e a posição da máquina de teste universal eletrônica sejam controladas, o sistema está realmente controlando a corrente (torque da máquina de teste universal eletrônica) para obter o controle correspondente da velocidade da máquina de teste universal eletrônica e a posição da máquina de teste universal eletrônica.
O terceiro anel é o anel de posição da máquina eletrônica de teste universal. É o anel externo. Pode ser construído entre o driver e o codificador do motor ou entre o controlador externo e o codificador do motor ou a carga final. Deve ser determinado de acordo com a situação real. Como a saída interna do anel de controle da posição da máquina de teste universal eletrônica é a configuração do anel de velocidade da máquina de teste universal eletrônica, o sistema executa todos os 3 anéis no modo de controle de posição da máquina de teste universal eletrônica. No momento, o volume de cálculo do sistema e a resposta dinâmica da máquina de teste universal eletrônica também são lentos.
Produtos recomendadosPRODUCTS